
Hyperopia, also known as farsightedness, long-sightedness or hypermetropia, is a defect of eye as the light is focuses at a point behind the retina not on the retina of the eye. Here, the victim can see distance object but near vision is difficult and causes strain. Hence hypermetropic people are called long-sighted.

Convex lens is used to rectify the vision or improve the vision. These lens converges rays of light which are traveling parallel to its principal axis meet at the focus. They produce real images. The lens of human eye is a double convex lens.
Myopia or Near sightedness is a deficiency of an eye, mostly due to error occurs with the focal length of the lens of the human eye. Here the victim is able to see near objects but far objects appear blurred.This disorder is when light entering the eye is focused incorrectly, making distant objects appear blurred.
Figure show an eye with such deficiency receiving light rays from a far off object. Due to the deficiency, the rays get focused ahead of the retina (the screen) and hence the eye is unable to perceive the object clearly.
Thus the image extends between points Im and Ip and a sharp point image is not possible for a point object . This defect is called spherical aberration . The distance between Im and Ip is the measure of the spherical aberration and is called the longitudinal (axial ) spherical aberration

The Electromagnetic spectrum is divided into several regions based on different frequencies, wavelengths and their characteristics. The figure shown below shows the Electromagnetic Spectrum Diagram which consists of all the em waves with respect to the wavelength and frequencies.

The Regions of the Electromagnetic Spectrum are as follows:
Infrared wave:
The infrared wave lies between 300 GHz to 405 THz and hence the infrared wavelength is in between 750 nm – 1 mm. The near infrared lies between 0.75-1.4 μμm wavelength range of infrared region while the far infrared lies between 15 – 1000 μμm wavelength range of infrared region. Infrared spectrometers are generally used to study the Vibrational Spectra of molecules.
Visible light :
The frequencies in this region can be sensed by our eyes and interpreted as colors ranging from violet to red. With the violet having shorter wavelength and higher frequency while the red color have higher wavelength and shorter frequency.
Ultraviolet wave or rays :
The ultraviolet rays lie above the visible spectrum and are invisible to our eyes. These waves can be felt as sun burns.
X-rays :
The X-rays lie above the ultraviolet band and are produced by the sudden stoppage of the high speed charged particle by the use of metal target which absorbs these particles and hence the x-rays are emitted by such particles.
Gamma rays :
The Gamma rays are of extremely low wavelength and are produced by the radioactive decay of the radioactive atoms.
The term LASER is an acronym for Light Amplification by Stimulated Emission of Radiation. The first laser was constructed in 1960.
(a) Action.
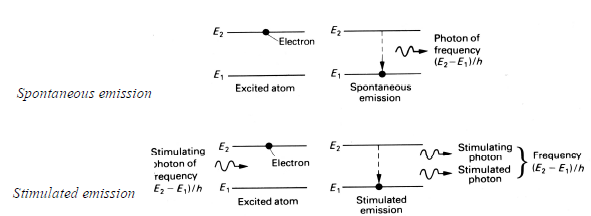
The action of a laser can be explained in terms of energy levels. A material whose atoms are excited emits radiation when electrons in higher energy levels return to lower levels. Normally this occurs randomly, i.e. spontaneous emission occurs, and the radiation is emitted in all directions and is incoherent. The emission of light from ordinary sources is due to this process. However, if a photon of exactly the correct energy approaches an excited atom, an electron in a higher energy level may be induced to fall to a lower level and emit another photon. The remarkable fact is that this photon has the same phase, frequency and direction of travel as the stimulating photon which is itself unaffected. This phenomenon was predicted by Einstein and is called stimulated emission
In a laser it is arranged that light emission by stimulated emission exceeds that by spontaneous emission. To achieve this it is necessary to have more electrons in an upper than a lower level. Such a condition, called an ‘inverted population’, is the reverse of the normal state to affairs but it is essential for light amplification, i.e. for a beam of light to increase in intensity as it passes through a material rather than to decrease as is usually the case.
One method of creating an inverted population is known as ‘optical pumping’ and consists of illuminating the laser material with light. Consider two levels of energies E1 and E2, where E2 > E1. If the pumping radiation contains photons of frequency (E2- E1)/h, electrons will be raised from level 1 to level 2 by photon absorption. Unfortunately, however, as soon as the electron population in level 2 starts to increase, the pumping radiation induces stimulated emission from level 2 to level 1, since it is of the correct frequency and no build up occurs.
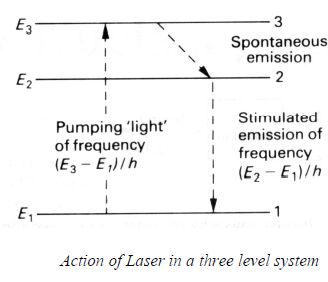
In a three level system, the pumping radiation of frequency (E3- E1)/h, raises electrons from level 1 to level 3, from which they fall by spontaneous emission to level 2. An inverted population can arise between level 2 and 1 if electrons remain long enough in level 2. The spontaneous emission of a photon due to an electronic fall from level 2 to level 1 may subsequently cause the stimulated emission of a photon which in turn releases more photons from other atoms. The laser action thus occurs between level 2 and 1 and the pumping radiation has different frequency from that o the stimulated radiation.
(b) Ruby Laser
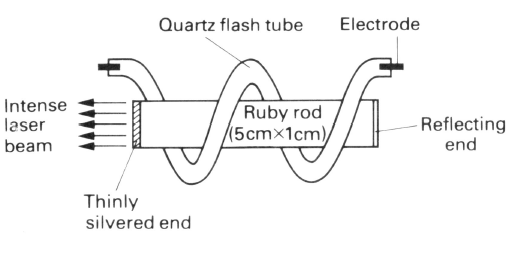
Many materials can be used in laser. The ruby rod laser consists of a synthetic crystal of aluminium oxide containing a small amount of chromium as the laser material. It is a type of three-level leaser in which ‘level’3 consists of a band of very close energy levels. The pumping radiation, produced by intense flashes of yellow-green light from a flash tube, raises electrons from level 1 ( the ground level) into one of the levels of the band. From there they fall spontaneously to the metastable level 2 where they can remain for approximately 1 millisecond, as compared with 10-8 second in the energy band. Red laser light is emitted when they are stimulated to fall to level 1 from 2. One end of the ruby rod is silvered to act as a complete reflector whilst the other is thinly silvered and allow partial transmission. Stimulated light photons are reflected to and fro along the rod producing an intense beam, part of which emerges from the partially
silvered end as the useful output of the laser.
(c) Helium – neon laser.
This uses a mixture of helium and neon, and whereas the ruby laser emits short pulses of light, it works continuously and produces a less divergent beam. In one form the gas is in a long quartz tube with an optically flat mirror at each end. Pumping is done by a 28 M Hz r.f. generator instead of a flash tube. An electric discharge in the gas pumps the helium atoms to a higher energy level. They then excite the neon atoms to a higher level by collision and produce an inverted population of neon atom which emit radiation when they are stimulated to fall to a lower level.
(d). Uses.
Semiconductor lasers are used in optical fibre communication systems. Ruby lasers are used for range finding, welding, drilling and microcircuit fabrication. Helium-Neon lasers are used for the precision measurement of length, surveying, printing and holography.
Speed and velocity
Acceleration
Acceleration is defined as rate of change of velocity.
![]()
Linear motion equations
v=u+at S=ut+½at² v²=u²+2as S=½(v+u)/t
Gradient of a displacement vs time graph gives velocity.
 gradient = 0 m/s so velocity = 0 m/s
gradient = 0 m/s so velocity = 0 m/s


Gradient of a velocity-time graph gives acceleration. Area under v-t graph gives displacement.
 Uniform velocity
Uniform velocity
| Positive Velocity Zero Acceleration |
Positive Velocity Positive Acceleration |
|---|---|
 |
 |
 Accelerating Decelerating
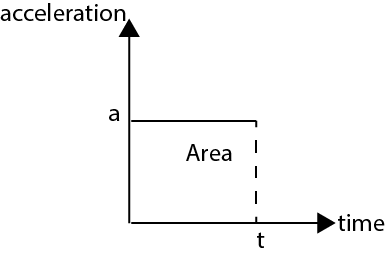
Accelerating DeceleratingAcceleration vs Time graph
Area=at=v-u=change in velocity
Center of mass
The center of mass of a distribution of mass in space is the unique point where the weighted relative position of the distributed mass sums to zero or the point where if a force is applied causes it to move in direction of force without rotation.
In the case of a single rigid body, the center of mass is fixed in relation to the body, and if the body has uniform density, it will be located at the centroid. The center of mass may be located outside the physical body, as is sometimes the case for hollow or open-shaped objects, such as a horseshoe.

Center of gravity
A body’s center of gravity is the point around which the resultant torque due to gravity forces vanishes. Where a gravity field can be considered to be uniform, the center of mass and the center of gravity will be the same. However, for satellites in orbit around a planet, in the absence of other torques being applied to a satellite, the slight variation in gravitational field between closer to and further from the planet can lead to a torque that will tend to align the satellite such that its long axis is vertical. In such a case, it is important to make the distinction between the center of gravity and the center of mass. Any horizontal offset between the two will result in an applied torque.
It is useful to note that the center of mass is a fixed property for a given rigid body , whereas the center of gravity may, in addition, depend upon its orientation in a non-uniform gravitational field. In the latter case, the center of gravity will always be located somewhat closer to the main attractive body as compared to the center of mass and thus will change its position in the body of interest as its orientation is changed.
Referring to the mass-center as the center of gravity is something of a colloquialism, but it is in common usage and when gravity gradient effects are negligible, center-of-gravity and cente of mass are the same and are used interchangeably.
Conditions for the Equilibrium
Conditions for the Equilibrium of Three Non-Parallel Forces
If we say that an object is under the influence of forces which are in equilibrium, we mean that the object is not accelerating – there is no net force acting.The object may still be travelling but at a constant velocity
| i) | The lines of action of the three forces must all pass through the same point. |
| ii) | The principle of moments: the sum of all the clock-wise moments about any point must have the same magnitude as the sum of all the anti-clockwise moments about the same point. |
| iii) |
a) The sum of all the forces acting vertically upwards must have the same magnitude as the sum of all the forces acting vertically downwards |
Lami’s theorem states that if three forces acting at a point are in equilibrium, each force is proportional to the sine of the angle between the other two forces.
Consider three forces A, B, C acting on a particle or rigid body making angles α, β and γ with each other.

According to Lami’s theorem, the particle shall be in equilibrium if


A cone cannot be made to stand on its tip. Theoretically, this feat might be possible if the cone could be placed with its center of gravity exactly in a vertical line through through the tip.
The cone would then be in equilibrium under the action of the force of gravity on it acting downwards and an equal and opposite reaction to its weight exerted on it by the table. But even if this condition could be achieved momentarily, the slightest vibration of the draught would inevitably cause the cone to tilt.
The force of gravity, W, would then exert a turning force about the tip, and this would cause the cone to topple over. A cone placed on its tip is said to be in unstable equilibrium.

The image shows the cone standing on its base. If tilted from this position, even through a fairly large angle, the vertical line through the center of gravity, G, will still fall inside the base.
Consequently, the force of gravity on the cone will have a moment W × x about an edge of the base which will pull the cone back into its original position.
Under these conditions, it is not easy to knock the cone over, and it is said to be in stable equilibrium.

Now, the cone is lying on its side. the base is simply a straight line, and if the cone is rolled into a new position the vertical line through the center of gravity still continues to pass through exactly the same point in the base.
Whatever the position of the cone, the reaction from the table will act in the same straight line as the force of gravity through G, and so the cone will be in equilibrium. The force of gravity exerts no moment about the base as axis and, if displaced, the cone will therefore remain at rest in its new position. This condition is described as neutral equilibrium.
It should be clear from the above explanation that the stability of a body depends on the direction of the turning moment exerted by the force of gravity on the body about the edge of the base, when the body is given a small displacement.
If a small displacement brings the vertical through the center of gravity outside the base the body will be unstable. If, however, the vertical remains within the base the body will be stable.
When a displacement causes no change in the position of the vertical through the center of gravity with respect to the base the body is in neutral equilibrium.
Freefall
A free fall is a downward motion without any initial force or velocity. Our earth has the inherent property of attracting items towards it. Hence a free fall is a natural phenomenon on earth for any object at any height without any support.
Free Fall Speed
Now we observe that in a free fall, the speed is not uniform. You might have observed that two stones dropped from different heights hit the ground with different velocities. The higher the height, greater is the speed of an object when it reaches the ground. It means that there is some acceleration is imparted on objects under free fall and the same is defined as ‘free fall acceleration’.
Free Fall Acceleration
Projectile motion
Consider the motion and path followed by the ball when it moves in the curved path. We will make two assumptions here:
a) First assumption is that the free fall acceleration (g) remains constant and does not change its value during the motion of the ball.
b) Resistance offered by the ball is negligible.
If we consider the motion and the assumptions stated above, we will find that :

Projectile motion is a two dimensional concept and it follows the two dimensional kinematics. A projectile has both the horizontal and the vertical components of motion.
Projectile motion can be stated as the:
Where,
y = height
t = time
a = acceleration of the projectile because of gravity
V0 = Initial velocity of the projectile
Y0 = Initial height of the projectile
For the vertical component of the velocity during the projectile motion, change in both the magnitude and direction takes place. If the projectile is moving in the upward direction, then the vertical component of the velocity is in the upward direction and decrease in its magnitude takes place.
| Equations involving Vertical Motion | Equations involving Horizontal Motion | Explanation of Symbols used |
| V(iy) = Vi sinθ | V(ix) = Vi cosθ |
|
| V(fy) = V(iy) + ay t | V(fx) = V(ix) |
|
| Yf – Yi = V(iy) t + ½ayt2 | Xf – Xi = V(ix) t |
|
(Vfy)2 = (V(iy))2 + 2ay(Yf– Yi) |
Symbols already described above | |
Yf – Yi=t.½(V(iy)+V(fy)) |
Symbols already described above |
Maximum Projectile Range : Expression
Now, lets look at the expression for projectile range using the above formula, Let the projectile start at (0, Yi) co-ordinates with a speed of Vi = v, and angle θ with the horizontal surface. After some time t, it strikes the ground at a distance of Xf. The value of Xf gives the range of the projectile
The figure given below aids the visualization of the motion :

In this figure, the range of the projectile is given by the formula,
d = Xf = ((Vcosθ)/g) (Vsinθ+√{(Vsinθ)²+2gYi)})
Using the above equation one can make a graph of `theta` versus `d` for different `theta`, and see where the value of `d` maximizes. This will be the value of maximum projectile range. Moreover, this equation reduces to a very simple form when the projectile starts form ground level, that is when YiYi = 0.
The equation then becomes :
Using the above equation we can very easily find the expression for maximum projectile range in this simple situation. We know that the maximum value of sin 2θ is 1.
Therefore, the maximum range of the projectile is
d = Xf = V²/g
Also, the value of 2θ for which sin 2θ = 1 is 90°. Therefore, the value of θ = 90/2 = 45°
This is a type of Projectile motion in which projectile does not follow path in the upward direction or it does not have upward trajectory and the initial velocity of the projectile is also zero. This type of projectile motion is called horizontal projectile motion. This motion generally occurs when the projectile is shot straight without forming any angle with the horizontal surface and the projectile falls downward until it hits the ground.
Exemplary Horizontal Projectile motion is shown in the figure below.

The figure above illustrates a body thrown horizontally from a point O with a velocity  The point O is at a certain height above the ground. Let x and y be the horizontal and vertical distances covered by the projectile, respectively, in time t. Therefore, at time t, the projectile is at p.
The point O is at a certain height above the ground. Let x and y be the horizontal and vertical distances covered by the projectile, respectively, in time t. Therefore, at time t, the projectile is at p.
In order to calculate x, let us consider the horizontal motion, which is uniform motion. This is because the only force acting on the projectile is the force of gravity. This force acts vertically downwards and hence the horizontal component in zero. Therefore, the equations of motion of the projectile for the horizontal direction is just the equation of uniform motion in a straight line.
∴ x = vt —————— (i)
In order to calculate y, the vertical motion of the projectile is considered. Since the vertical motion is controlled by the force of gravity, it is an accelerated motion. The initial velocity, vy (0), in the vertically downward direction is zero. Since the Y-axis in the figure above is taken downwards, the downward direction is regarded as the positive direction. So, the acceleration of the projectile is + g.
∴ from the equation
y(t) = Vy(0)t + ½ ay t2
We have y(t) = ½ gt2 ————-(2)
Here vy (0) is taken as zero because both distance and time are being measured from the origin O.
From equation (1)
t = x/v
Substituting for t from the above equation in equation (2) we have,
y(t) = ½g(x/v)² = ( g/2v² )x2
∴ y = kx2 Where k = g/2v²……………..(3)
is a constant for a projectile projected upwards with a definite velocity v and at a place with a definite value of ‘g’.
Equation (3) is a second-degree equation in x, a first-degree equation in y and is the equation of a parabola. Therefore, a body thrown horizontally from a certain height above the ground follows a parabolic trajectory till it hits the ground.
Resultant Velocity of a Horizontal Projectile:
In this section, let us calculate the resultant velocity of the projectile V⃗ V→, at any point p on the trajectory, in an interval of time t. Vxand Vy are the horizontal and vertical components of V⃗ V→ as illustrated in the figure below.

Since, the horizontal motion of the projectile is uniform, V⃗ x = V⃗
However, the motion in the vertical direction is an acceleration one.
∴∴ Vy(t) = Vy (0) + ay t
Since O is considered to be the origin, Vy (0) = 0
∴∴ Vv (t) = gt
∴∴ The magnitude of the resultant velocity V⃗ is given by,
|V⃗ | = V =√ (V²x+V²y)
∴ V = √(V²+g²t²)
The direction is given by tanβ = Vy/Vx= gt/V
∴β = tan-1 (gt/V)
Motion -The change of position of a body with time is called motion.
It was Galileo who first realized that motion of a body is independent of its mass, it is the change of state of motion or state of rest.
Inertia
A body is said to possess a property called inertia The inertia of a body is measured by its reluctance to change its state of motion or state of rest. Examples
Newton’s first law
A body continues its state of rest or moves with uniform velocity unless acted on by some external force.
Linear momentum
Linear momentum is a vector quantity defined as the product of an object’s mass m and its velocity v. Linear momentum is denoted by the letter p .
Note that a body’s momentum is always in the same direction as its velocity vector. The units of momentum are kg m/s.
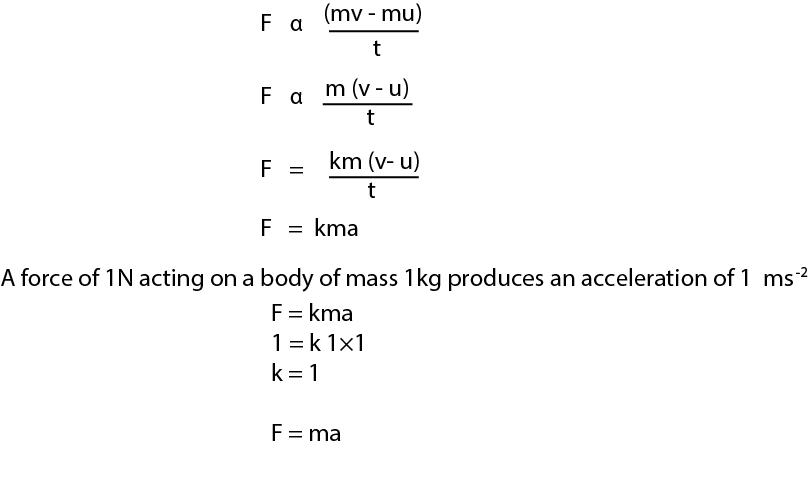
Newton’s second law
The rate of change of momentum of a body is directly proportional to the external force acting on the body and change in momentum takes place in the direction of force.
Newton’s third law
Whenever an object exerts a force on another object,the second object exerts an equal and opposite force on the first.These are called action, reaction. For every action there is always an equal and opposite reaction.

Note
Friction is the force resisting the relative motion.It comes to existence at the common boundary of two bodies in contact when one of them either moves or tends to move relative to other. Friction acts tangental to the surface and it is directed such that it opposes relative motion.
The surface of a body is never perfectly smooth, little prominences and hollows are always present.When two body is in contact the prominences of one are interlocked with hollows of other.In the relative motion of the bodies these little prominences are deformed and give rise to frictional forces.
Sliding friction
When a body slides over another body , the force that opposes relative motion is called sliding friction.
Specific examples of sliding friction include:
Rolling friction
When a round object rolls over some surface then rolling friction comes into play.Rolling friction is much smaller than sliding friction.
When two bodies that are in contact with each other and move rubbing the surfaces that are in contact, the friction existing between them is called kinetic friction. The direction of the force is such that the relative slipping is opposed by the retarding force .
Note-The coefficient of friction does not depend upon the speed of the sliding bodies. If the surfaces are smooth then it will be small, and it will be large if the surface is rough
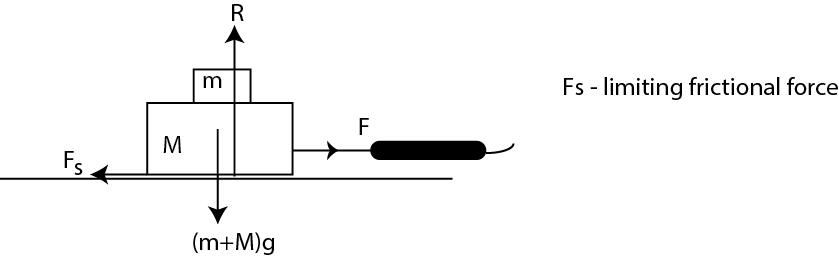
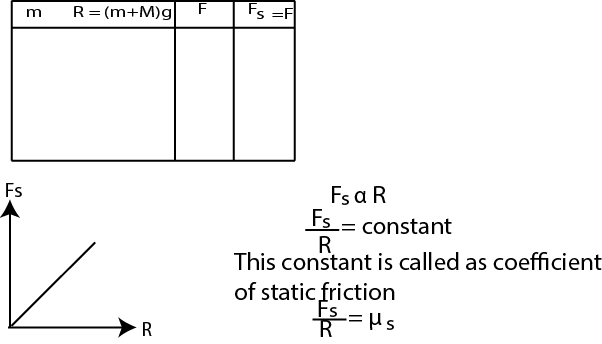
Fs = μs R
where,
μ is is the Coefficient of Static friction
R is the Normal reaction
Limiting frictional force between two given surfaces depend on the normal reaction between them.To investigate relationship do an experiment with known masses placed on the block.
A body is said to perform a pure rotational motion if every particle in the body moves in a circular path such that the centers of all those circles lie on a single straight line called as the axis of rotation.
Angular acceleration
When an object rotates its angular velocity changes with time.Angular acceleration is defined as rate of change of angular velocity.

[α]=T-2 Unit – rads-2
The translational acceleration of a point on the object rotating is given by
where r is the radius or distance from the axis of rotation. This is also the tangential component of acceleration: it is tangential to the direction of motion of the point.
When the angular acceleration is constant, the five quantities angular displacement  , initial angular velocity
, initial angular velocity  , final angular velocity
, final angular velocity  , angular acceleration
, angular acceleration  , and time
, and time  can be related by four equations of kinematics:
can be related by four equations of kinematics:




Moment of inertia
The moment of inertia of an object is a measure of the object’s resistance to changes to its rotation. The moment of inertia is measured in kg m². It depends on the object’s mass: increasing the mass of an object increases the moment of inertia. It also depends on the distribution of the mass: distributing the mass further from the centre of rotation increases the moment of inertia by a greater degree.
Torque
Torque  is the twisting effect of a force F applied to a rotating object which is at position r from its axis of rotation.
is the twisting effect of a force F applied to a rotating object which is at position r from its axis of rotation.

A net torque acting upon an object will produce an angular acceleration of the object according to

just as F = ma in linear dynamics.
The work done by a torque acting on an object equals the magnitude of the torque times the angle through which the torque is applied

The power of a torque is equal to the work done by the torque per unit time

Angular momentum
The angular momentum L is a measure of the difficulty of bringing a rotating object to rest. It is given by
Angular momentum is related to angular velocity by

The greater the angular momentum of the spinning object such as a top, the greater its tendency to continue to spin.
The Angular Momentum of a rotating body is proportional to its mass and to how rapidly it is turning. In addition the angular momentum depends on how the mass is distributed relative to the axis of rotation: the further away the mass is located from the axis of rotation, the greater the angular momentum . A flat disk such as a record turntable has less angular momentum than a hollow cylinder of the same mass and velocity of rotation.
Like linear momentum, angular momentum is vector quantity, and its conservation implies that the direction of the spin axis tends to remain unchanged. For this reason the spinning top remains upright whereas a stationary one falls over immediately.
Torque and angular momentum are related according to

just as F = dp/dt in linear dynamics
Law of conservation of angular momentum
If there is no external torque acting on a system the angular momentum remains unchanged.
Rotational kinetic energy
When an object rotates about an axis every particle in that body moves in a circle then rotational kinetic energy is the sum of total kinetic energy of particle.
When an object moves in a path where the distance from a fixed to that object is constant.Then its path is a circle and and its motion is called circular motion.
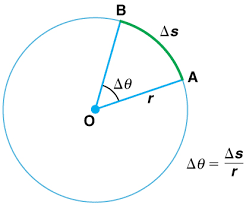
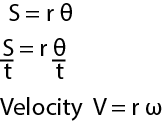
Angular displacement
Angular velocity
In a circular motion ,with time distance changes.At the same time angle also changes.So there is a need to define angular velocity.
 Rate of change of angular displacement is called angular velocity
Rate of change of angular displacement is called angular velocity

[ω]=T-1
unit – rads-1
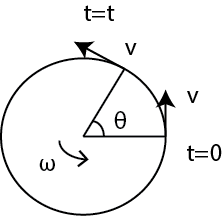
In uniform circular motion velocity is not uniform because in every point direction changes
In time t, distance traveled= S
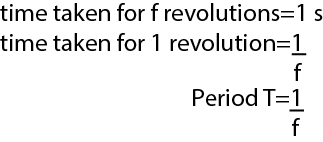
Time period(T)-Time taken for one complete revolution.
Frequency-In unit time number of revolutions take place.
In 1s number of revolutions=f
In 1s angle it makes=2πf
Angular velocity ω=2πf
Centripetal acceleration
In a uniform circular motion acceleration is always directed towards the center.So it is called centripetal acceleration.
Centripetal force
Centripetal force is a force which acts on a body moving in a circular path and is directed towards the center around which the body is moving.
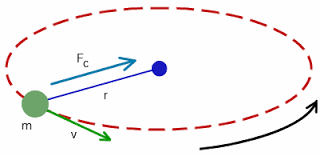 Fcentripetal = mrω²
Fcentripetal = mrω²Banked curve

The above image shows a ball in circular motion on a banked curve. The curve is banked at an angle θ from the horizontal, and the surface of the road is considered to be slippery. The objective is to find what angle the bank must have so the ball does not slide off the road.Intuition tells us that, on a flat curve with no banking at all, the ball will simply slide off the road; while with a very steep banking, the ball will slide to the center unless it travels the curve rapidly.
Apart from any acceleration that might occur in the direction of the path, the lower part of the image above indicates the forces on the ball. There are two forces; one is the force of gravity vertically downward through the center of mass of the ball mg, where m is the mass of the ball and g is the gravitational acceleration ; the second is the upward normal force exerted by the road perpendicular to the road surface man. The centripetal force demanded by the curved motion is also shown above. This centripetal force is not a third force applied to the ball, but rather must be provided by the net force on the ball resulting from vector addition of the normal force and the force of gravity. The resultant or net force on the ball found by vector addition of the normal force exerted by the road and vertical force due to gravity must equal the centripetal force dictated by the need to travel a circular path. The curved motion is maintained so long as this net force provides the centripetal force requisite to the motion.
The horizontal net force on the ball is the horizontal component of the force from the road, which has magnitude Fh = mansinθ. The vertical component of the force from the road must counteract the gravitational force: Fv = mancosθ = mg, which implies an=g / cosθ. Substituting into the above formula for Fh yields a horizontal force to be:

On the other hand, at velocity v on a circular path of radius r, kinematics says that the force needed to turn the ball continuously into the turn is the radially inward centripetal force Fc of magnitude:

Consequently, the ball is in a stable path when the angle of the road is set to satisfy the condition:

or,

As the angle of bank θ approaches 90°, the tangent function approaches infinity, allowing larger values for v2/r. In words, this equation states that for faster speeds the road must be banked more steeply (a larger value for θ), and for sharper turns (smaller r) the road also must be banked more steeply. When the angle θ does not satisfy the above condition, the horizontal component of force exerted by the road does not provide the correct centripetal force, and an additional frictional force tangential to the road surface is called upon to provide the difference. If friction cannot do this , the ball slides to a different radius where the balance can be realized.
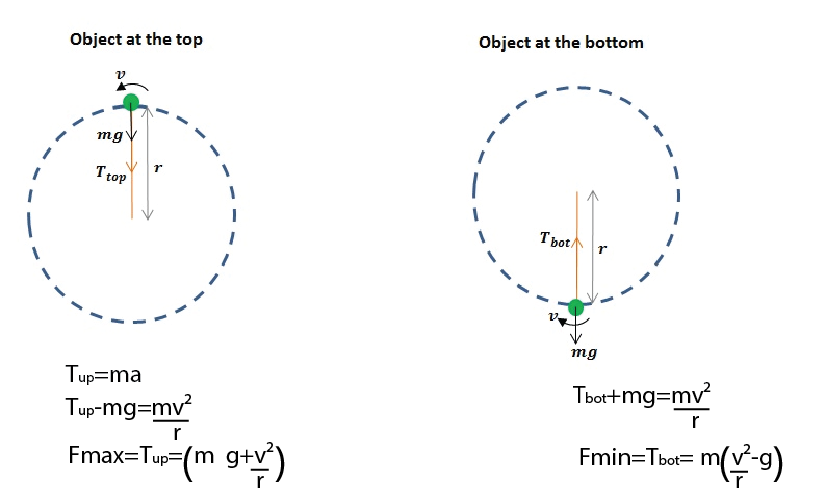
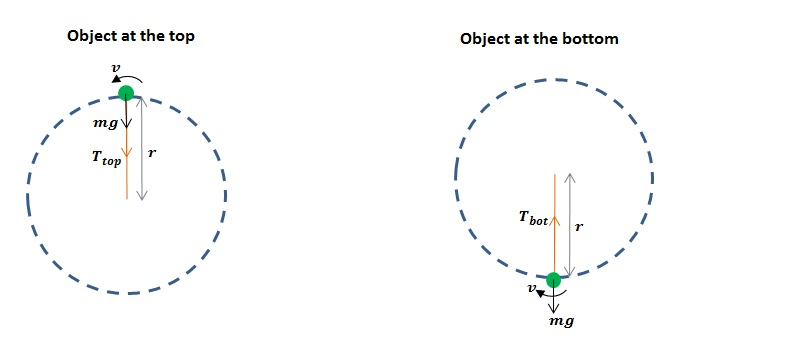
In vertical circular motion
Work
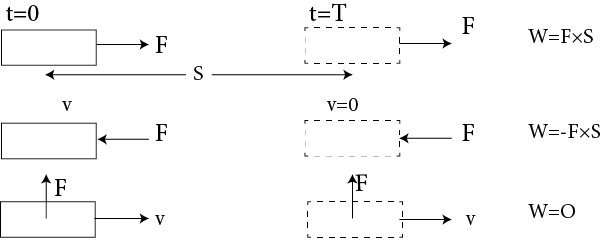
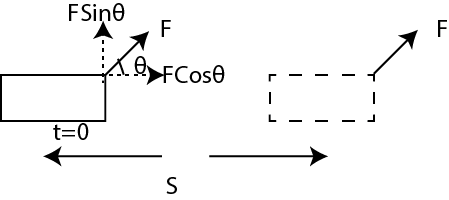
The word work is used only in those cases where there is a force and a displacement occurs in the direction of force.
Work done = Force acting on the body × Distance moved in the direction of force
W = F × S
[W] = ML2T-2
Unit – kgm2s-2 = joule
1 J – 1 joule is the work done by a force of 1N acting through a distance of 1m in the direction of force.
Power
Power is the rate of doing work.
[P]=ML2T-3
Unit – kgm2 t-3 =Js-1 Watts
1Watt – Capable of doing work at the rate of 1Js-1 is said to possess a power of 1W
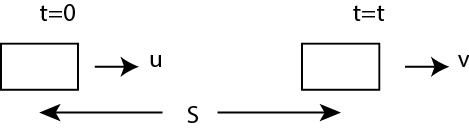
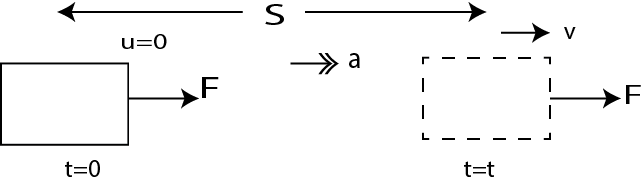
 t=0 t=t
t=0 t=t
Work done by applied force W=F×S
Work done by applied force in unit time = F×S/t
Power=F×V
Ability to do work is called energy.
An object has kinectic energy due to its motion.
Kinetic Energy = ½mv²
Gravitational potential energy is a energy due to the position of the object.
Gravitational potential energy= mgh
Elastic potential energy is Potential energy stored as a result of deformation of an elastic object, such as the stretching of a spring. It is equal to the work done to stretch the spring, which depends upon the spring constant k as well as the distance stretched. According to Hooke’s law, the forcerequired to stretch the spring will be directly proportional to the amount of stretch.
F = -kx |
x- extension k-spring constant
Elastic potential energy=½kx² =work done =area of the triangle
Mechanical energy is the sum of the potential and kinetic energies in a system. The principle of the conservation of mechanical energy states that the total mechanical energy in a system (i.e., the sum of the potential plus kinetic energies) remains constant as long as the only forces acting are conservative forces.
{kind=link}
{kind=link}